
Just like servo motors, a stepper motor is equally reliable. In fact, it is being used for different applications. Let’s learn more about stepper motors and see if they are the appropriate motor for your project.
What Is a Stepper Motor?
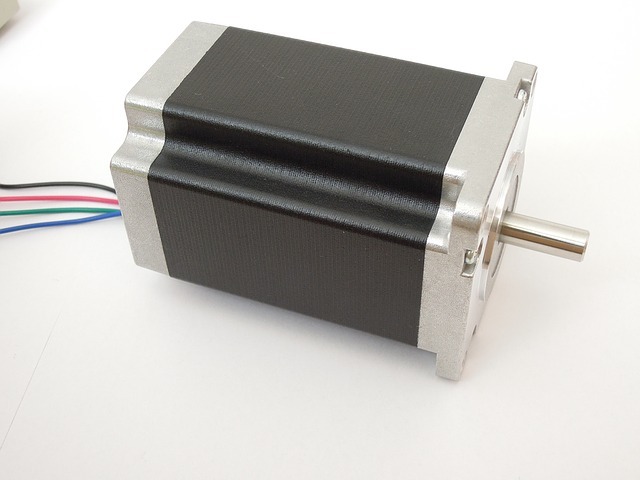
Stepper motors are electromechanical devices that work to transform electrical power into mechanical power. Also known as “brushless DC electric motors”, they cut a full rotation into a series of steps. Even without a feedback mechanism, the position of a stepper motor can be controlled. This will work as long as the motor is sized meticulously for the application. Stepper motors and switched reluctance motors are pretty much the same.
Working principle
How a stepper motor is designed and constructed is like a more complex version of a brushed DC motor. Just like any electric motors, stepper motors have two parts: the stationary part (the stator) and the moving part (the rotor). The stator has teeth with wired coils, while the rotor works as a variable reluctance iron core or simply a permanent magnet. Basically, the electromagnet in the stator is positioned around a central piece of iron shaped like a gear, which is the rotor. For the electromagnet to work, an external control circuit or motion controller is used.
When one or more stator phases are energized, they produce a magnetic field. This is achieved through the current flowing in the coil, and the rotor sets into this field. The rotor can be turned into an exact amount to reach the desired final position through the supplication of different phases in sequence.
Remember that stepper motors rotate in steps and not continuously. Coils are also not connected in a stepper motor. The shaft rotation direction of this motor is determined through a 90 degree-rotation step with the coils being energized in a cyclic sequence. Every time the coil is activated, the shaft turns 90 degrees. The torque results depend directly on the current.
Types of stepper motors
Permanent Magnet – In this type of stepper motor, the rotor has a permanent magnet (PM) that attracts or repulses between the rotor PM and the stator electromagnet.
Variable Reluctance – This kind of stepper motor has a plain iron rotor. It works based on the principle where the minimum reluctance takes place with the minimum gap. Thus, the rotor points are pulled toward the stator magnet poles.
Hybrid Synchronous – The combination of permanent magnet (PM) and variable reluctance (VR) methods result in hybrid stepper motors. Though they come in a small package, these kinds of stepper motors can still achieve maximum power.
Stepper Motor Applications
Projects that require simple position control or the ability to hold a position can benefit from stepper motors. Stepper motors are used in different applications, but not every project is suitable. Nevertheless, these motors are still highly reliable. Moreover, they deliver incredible speed control, exact positioning, and repeatability of motion.
The most common devices and systems with stepper motor applications are:
- Printers
- 3D printers
- Digital single-lens reflex (DSLR) cameras
- Video cameras
- Robots
- Automated teller machines (ATMs)
- Gaming machines
- Engraving machines
- Textile machines
- Welding equipment
- Computer numerical control (CNC) milling equipment
Advantages and Disadvantages of Stepper Motors
Here are some of the benefits as to why stepper motors are used in different applications.
- Flexibility – Stepper motors deliver constant holding torque even without powering the motor itself.
- Greater torque – Torque is defined as the measure of the force that causes an object to turn around a fulcrum, axis, or pivot. Because of the high pole count of stepper motors, they can generate very high torque at zero speed. This is why the application of stepper motors in robotics and other positioning projects is a common practice.
A stepper motor’s torque at low speeds is greater compared to a servo motor with a similar size. Furthermore, even without extra gearing or gearbox mechanisms, a stepper motor can still drive many loads into an application.
- Impeccable repeatability – Stepper motors are competitive when it comes to repeatability. They can be repeatable in many applications, primarily when operating in one direction. The step angle accuracy of a stepper motor is at 3-5% of one step.
- Longer life expectancy – Most moving parts of a stepper motor are frictionless. Because of this, stepper motors are expected to have a longer life. This is due to the fact that bearings are the only part of this motor that will wear out.
- Cheaper cost than servo motors – Open-loop systems don’t call for positional or torque feedback, which is why they typically use stepper motors. These motors have natural stopping points that allow continuous operations even without position feedback. This feature makes these motors cost-efficient and simpler to control.
While stepper motors are reliable, they also come with some disadvantages.
- Noise – In moderate to high speeds, stepper motors can be very loud. However, newer and improved stepper motors and drivers now come with anti-resonance modes. This feature helps with optimizing stability, torque, and noise reduction.
- No feedback mechanism – Stepper motors bring no feedback to the control system to give a signal that potential steps are missed. When using them in an open-loop system, steps could be missed if the machine load is too high, or the motor tries to move too fast. Because there’s no means of identifying missed steps, the operation may start over and revert in setting the position required.
- Torque decline with speed – Yes, stepper motors have great torque. However, high speeds restrict sufficient current to pass through the winding prior to moving to the next phase. This results in decreasing the torque provided. Upon reaching high speeds, stepper motors tend to lose 80-100% torque.
- Low efficiency – Whenever their poles are energized, stepper motors draw the maximum current. This reduces energy efficiency and increases losses because of heat. Therefore, these motors are not the best option efficiency-wise.
- Low accuracy – Stepper motors best suit projects with low accuracy requirements. But if you still want to use them for your project, there are three ways you can apply to improve its accuracy.
- Increase the number of rotor teeth
- Use gears to decrease the amount of movement in each step or add more lead screw threads per inch
- Apply micro-stepping
Conclusion
A stepper motor is a very useful electromechanical device. It’s no wonder why it’s the chosen motor for several applications. All motors have their pros and cons. Projects with low speed, low acceleration, and low accuracy will be best for stepper motors.
Having a hard time understanding stepper motors and other types of motors? Let the Valve Time editorial team enlighten you to the world of electric motors. You can read our articles if you want to dig deeper into these topics.
We also provide informational pieces about gaming, automotive, digital marketing, motion control, and other related topics. Check out the latest tech news and information today!






